Kalman-Filter zur hochgenauen Positionsschätzung
Veröffentlicht im Nov 2023 von MechLab Engineering UG (haftungsbeschränkt) ~ 4 min Lesezeit
Die Positionsbestimmung von Fahrzeugen mittels GPS ist heutzutage ein alltäglicher Bestandteil unseres Lebens. Wir verlassen uns auf satellitengestützte Navigation, um uns präzise und zuverlässige Standortinformationen zu liefern. Idealerweise ist die ermittelte Position auf der Erdoberfläche durch GPS Satelliten genau bestimmbar. Die Funksignale, die GPS-Geräte erreichen, sind anfällig für Hindernisse wie Gebäude und atmosphärische Störungen, die sich nachteilig auf die Genauigkeit unserer Positionsbestimmung auswirken können. Dies führt zu unerwünschten Ungenauigkeiten.
| Ideale Bedingungen für GPS Positionsbestimmung | Realität bei der GPS Positionsbestimmung |
|---|---|
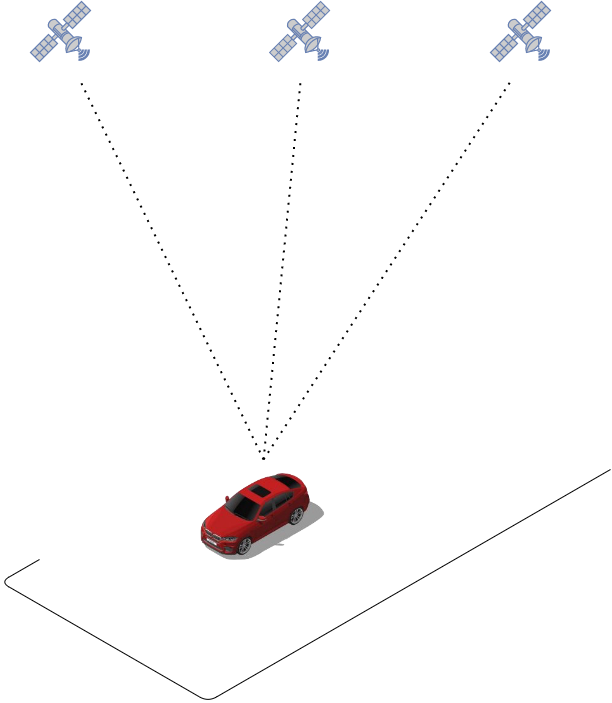 | 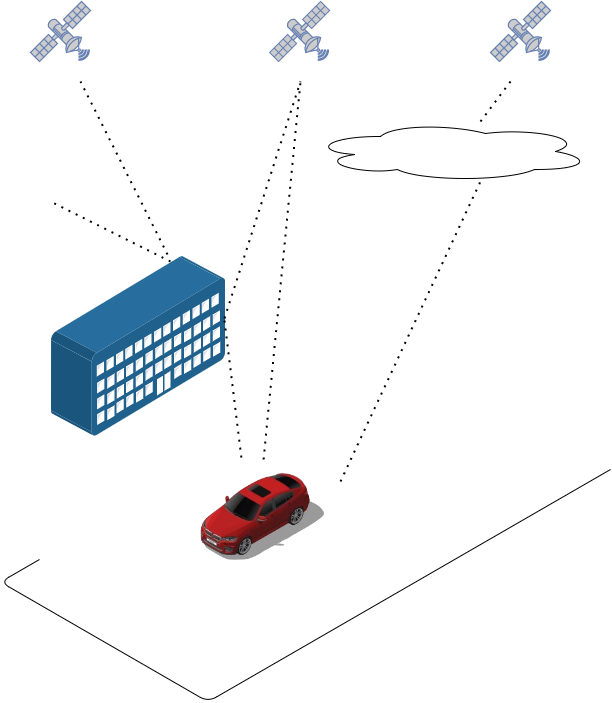 |
Die Bestimmung der Fahrzeugposition allein mit GPS-Signale kann in bestimmten Situationen unzureichend sein.
Fahrzeugdynamik
Prinzipiell ist es auch möglich, die Position mithilfe im Fahrzeug befindlicher Sensoren zu bestimmen. Dies kann vom fahrzeugeigenen CAN-Bus oder einer IMU ermittelt werden. Hierbei werden Informationen über die Fahrzeuggeschwindigkeit ($v_x$) und die Drehrate ($\omega$) erfasst und basierend auf der Fahrzeugdynamik (so genanntes “Constant Turn Rate, Constant Velocity” CTRV-Modell) vorausberechnet. Bei idealen Sensorwerten ermöglicht dieses Verfahren die genaue Bestimmung der Position, unabhängig von externen GPS-Signalen (so genanntes “Dead Reckoning”).
| GPS Position + Fahrdynamikdaten | Mathematische Beschreibung |
|---|---|
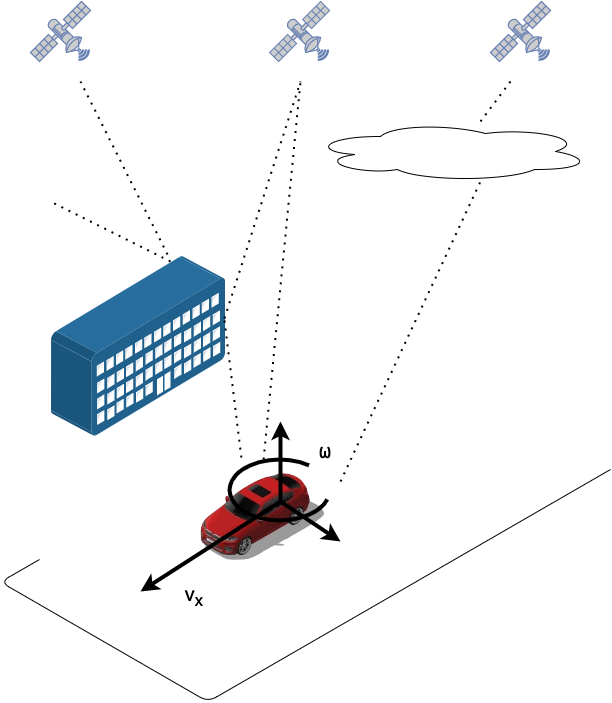 | $x_\text{CTRV} = \begin{bmatrix} \text{Lat} \\ \text{Lng} \\ \phi \\ v_x \\ \omega \end{bmatrix}$ |
Die Positionsbestimmung und Fahrdynamik eines Fahrzeugs sind eng miteinander verknüpft und können effektiv durch einen Zustandsvektor ($x_\text{CTRV}$) beschrieben werden. Dieser Zustandsvektor umfasst Informationen wie Breiten- und Längengrad (vom GPS gemessen), Fahrtrichtung, Fahrgeschwindigkeit und Drehrate (Gierrate) des Fahrzeugs (durch fahrzeugeigene Sensoren gemessen).
Sensordaten und Fahrzeugdynamik
Durch die Erfassung und Aktualisierung dieser Parameter kann der aktuelle Zustand des Fahrzeugs in Echtzeit bestimmt werden. Ist eine Anfangsposition ($\text{Lat}$, $\text{Lng}$) bekannt, kann bei idealen Sensorwerten für jeden beliebigen Zeitschritt $T$ eine Position aus der Bewegungsdynamik des Fahrzeugs bestimmt werden:
$$g_A=\begin{bmatrix} \text{Lat} + \frac{v}{\omega}\left(\sin(\omega T+\phi)-\sin(\phi)\right) \\ \text{Lng} + \frac{v}{\omega}\left(-\cos(\omega T+\phi)+\cos(\phi)\right) \\ \omega T + \phi \\ v_x \\ \omega \end{bmatrix}$$
Sensorwerte sind im Allgemeinen aber fehlerbehaftet, da sie durch verschiedene Faktoren beeinflusst werden können. Physikalische Einflüsse wie Rauschen, Ungenauigkeiten in der Sensorhardware, Temperaturschwankungen und andere Umgebungsbedingungen können zu Abweichungen in den gemessenen Werten führen. Zudem sind externe Störungen wie elektromagnetische Interferenzen und atmosphärische Bedingungen weitere Faktoren, die die Genauigkeit von Sensorsignalen beeinträchtigen können. Daher ist es von entscheidender Bedeutung, geeignete Methoden und Algorithmen zur Fehlerkorrektur und -kompensation einzusetzen, um zuverlässige und präzise Informationen aus sensorbasierten Systemen zu gewinnen.
Sensordatenfusion mit adaptivem Extended-Kalman-Filter
Das Kalman Filter gilt als ein optimaler Zustandsschätzer für die Sensordatenfusion. Es basiert auf mathematischen Modellen und Statistik, um die bestmögliche Schätzung des aktuellen Zustands eines Systems ($x_\text{CTRV}$), basierend auf vorherigen Zustandsschätzungen und Messwerten, zu liefern. Das Filter berücksichtigt Unsicherheiten in den Messungen und Modellen, welche adaptiv angepasst werden können (z.B. bei Verschlechterung des GPS Signals).
Ein adaptives Extended Kalman Filter ist notwendig, um die spezifischen Anforderungen der Fahrzeugpositionsbestimmung unter variablen Bedingungen, wie Abschattung und atmosphärische Störungen, effektiv zu erfüllen. Das Kalman Filter ist ein dynamisches Verfahren, das in zwei Schritten operiert: Zunächst erfolgt die Vorhersage des Systemzustands (Prediction mit Zeit $T$) basierend auf dem aktuellen Zustand und dem System-Modell (CTRV). Anschließend wird dieser vorhergesagte Zustand mithilfe von Messwerten der Sensoren korrigiert (Correction).
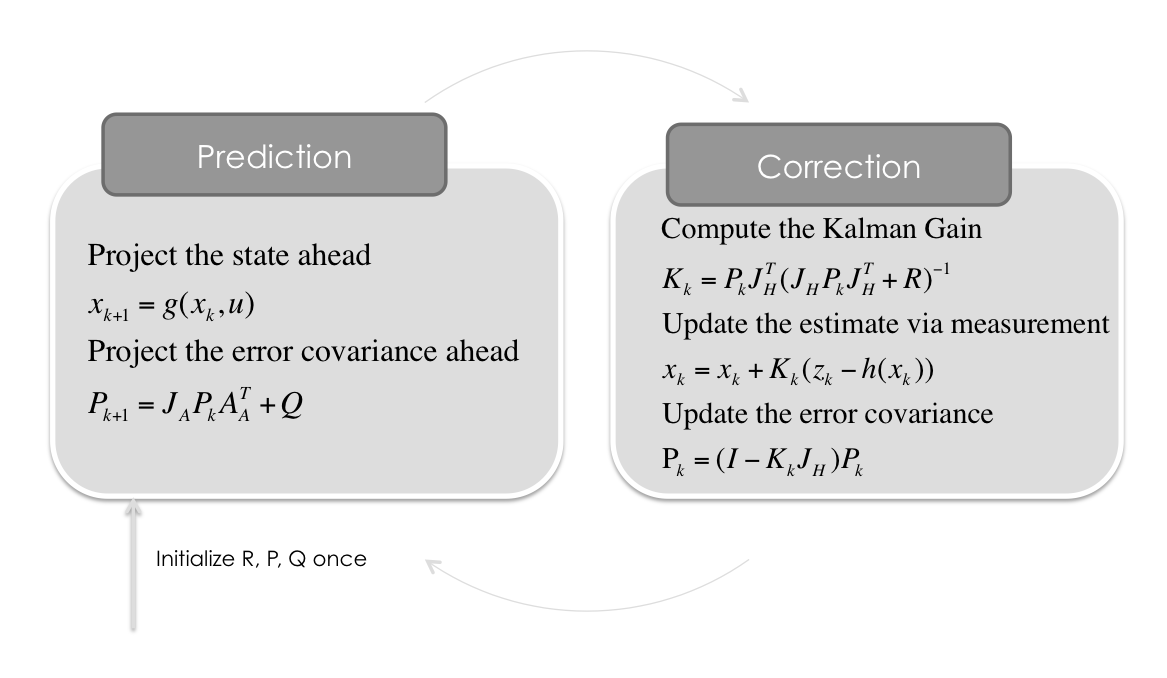
Dieser kontinuierliche Prozess der Zustandsvorhersage und -korrektur ermöglicht eine präzise und dynamische Aktualisierung der Positionsschätzung des Fahrzeugs in Echtzeit.
Zusammenfassung
Mit langjähriger Erfahrung in der Implementierung und Anwendung des Extended Kalman Filters in verschiedenen Teilen der Welt, darunter Japan, Indien, die USA und Deutschland, hat MechLab Engineering die reale Anwendbarkeit der Algorithmen bewiesen. Unsere Implementierungen des adaptiven Extended Kalman Filters (Internationales Patent WO 2023/200939 A1) sind global bei führenden Tier-1-Automobilzulieferern und OEMs im Einsatz und tragen dazu bei, die Herausforderungen der Fahrzeugpositionsbestimmung in unterschiedlichsten Umgebungen erfolgreich zu bewältigen.
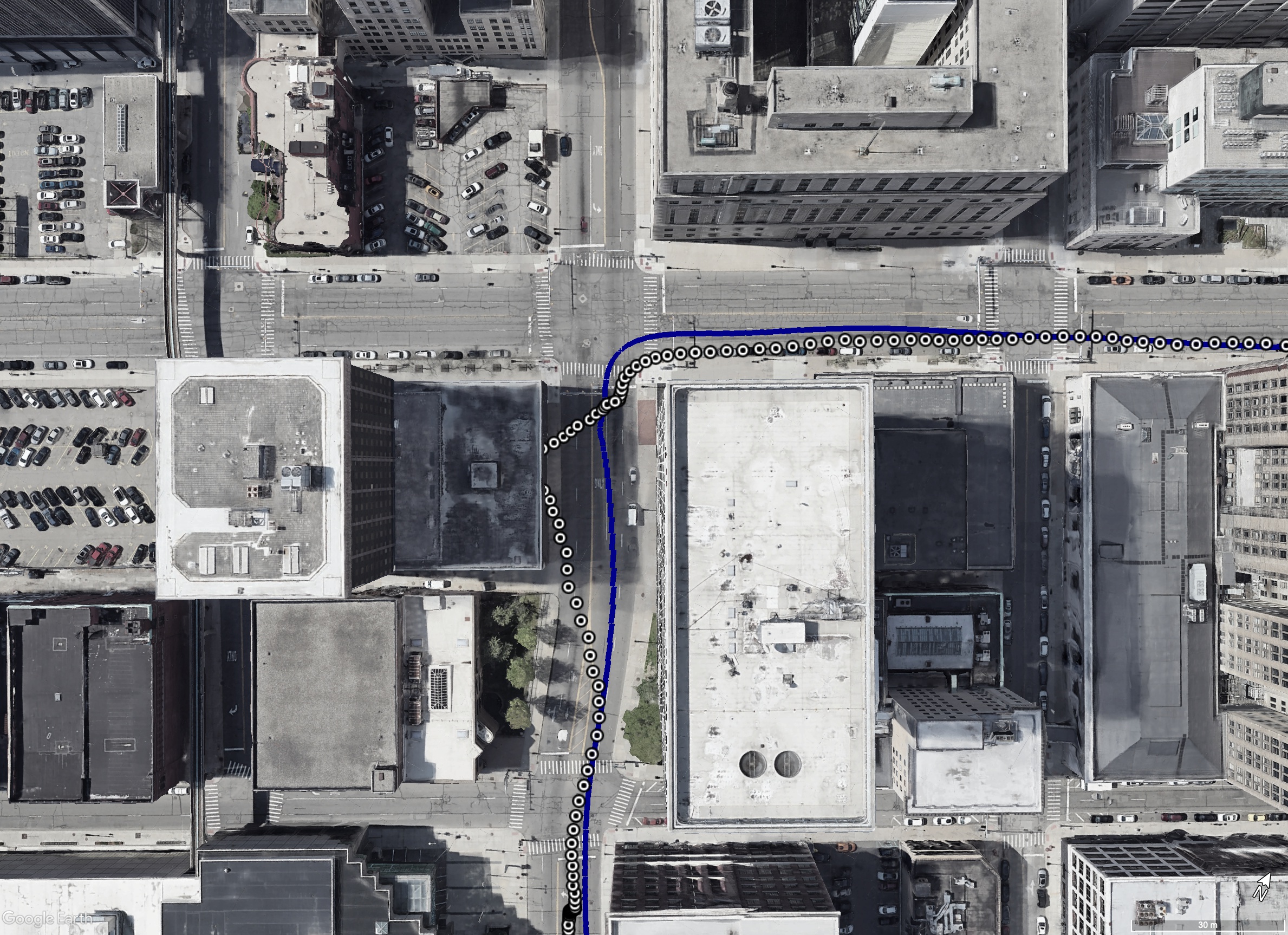
GPS Messungen (weiße Punkte) und Kalman-Filter Trajektorie (blaue Linie) in einer typischen Innenstadt-Situation mit Abschattung durch Gebäude
Eine hochgenaue Positionsbestimmung ist von entscheidender Bedeutung für eine Vielzahl von Telematikdiensten, wie etwa automatisierte Abrechnung von Park-, Lade- oder Tankvorgängen, Maut-Erhebung oder Parkhaus-Navigation. Präzise Standortinformationen ermöglichen eine nahtlose Interaktion zwischen Fahrzeugen und Infrastruktur, wodurch innovative Dienste und Automatisierungen realisierbar werden. Dies stellt nicht nur einen Schlüssel für die Effizienzsteigerung im Straßenverkehr dar, sondern ermöglicht auch die Entwicklung neuer, kundenorientierter Lösungen im Bereich der Mobilität und Fahrzeugnutzung.
